Adam Valent, Filip Å tiglic
Abstract. The aim of this project is a coope ration of two works. The first one is an assistance system for the driver, which detects and recognizes road traffic signs with a camera mounted in a moving vehicle and alerts the driver afterwards. The second work provides an experimental simulation environment, which allows evaluating the current level of driver’s awareness by monitoring the driver’s reactions. The goal of this project is to compare reaction response times of the driver with the assistance system turned on and off. Both works are in the last phase of implementation, which will be followed with an extensive testing on humans.
System architecture

Assistance system architecture

Detection
The detection part is responsible for detecting the areas with the candidates for traffic signs in a specific frame captured by camera. The process of detection is consisting of several steps. In the first step we use a color segmentation in which the colors specific for traffic signs are segmented to distinguish the colors of the traffic sign from the color of the environment. In the next step Canny edge detector is used to detect edges and in the last step Hough transformation is used to detect individual shapes.
Since the results of the detection part are the areas with the candidates of known shape and color, the detection part will be also used as a pre-classifier for the classification part. For this reason we decided to create a model of traffic sign groups of specific color and shape.

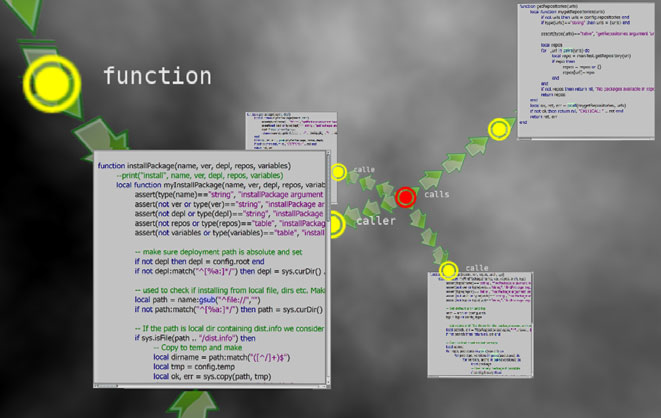
Classification part
The classification part is responsible for the classification of the areas with the candidates obtained from the detection part by comparing them with the template signs stored in the database. In order to be able to compare the area with the template sign from the database it is necessary to use a method, which will be fast enough, effective and invariant to the changes of scale, rotation and various lightning condition.
We decided to use the novel method introduced in 2006 – SURF [3] (speeded up robust features) which is a performant scale and rotation invariant interest point detector and descriptor. It approximates or even outperforms previously proposed schemes with respect to repeatability, distinctiveness, and robustness, yet can be computed and compared much faster.
Simulation enviroment

Paper
Poster