This project is focused on tracking tongue using just the information from plain web camera. Â Majority of approaches tried in this project failed including edge detection, morphological reconstruction and point tracking because of various reasons like homogenous and position-variable character of tongue.
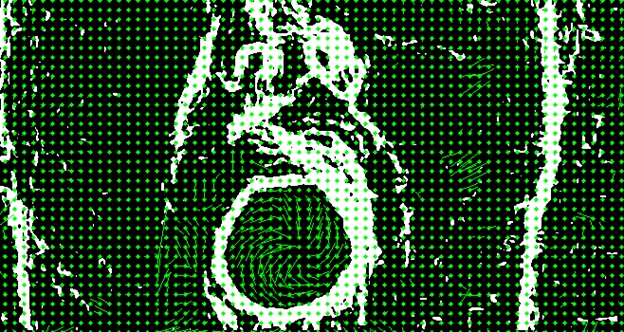
The approach that yields usable results is Farneback method of optical flow. By using this method we are able to detect the direction of movement in image and tongue specifically when we use it on image of sole mouth. However mouth area found by haar cascade classifier is very shaky so the key part is to stabilize it.
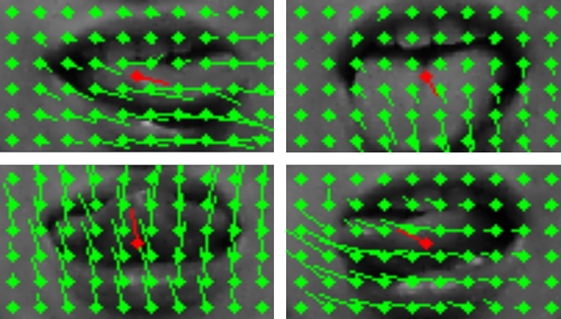
In this project, we aim to recognize the gestures made by the users by moving their lips; Examples: closed mouth, mouth open, mouth wide open, puckered lips. The challenges in this task are the high homogeneity in the observed area, and the rapidity of lip movements. Our first attempts in detecting said gestures are based on the detection of the lip movements through flow with the Farneback method implemented in OpenCV, or alternatively the calculation of the motion gradient from a silhouette image. It appears, that these methods might not be optimal for the solution of this problem.
Detect the position of the largest face in the image using OpenCV cascade classifier. Further steps will be applied using the lower half of the found face.
faceRects = detect(frame, faceClass);
Transform the image map to HLS color space, and obtain the luminosity map of the image
Combine the results of horizontal and vertical Sobel methods to detect edges of the face features.
Add accumulative edge detection frame images on top of each other to obtain the silhouette image. To prevent raised noise in areas without edges, apply a threshold to the Sobel map.
This project tries to solve the problem of sky detection using the Slic superpixel segmentation algorithm.
Analysis
The first idea was to use Slic superpixel algorithm to segment an input image and merge pairs of adjecent superpixels based on their similarity. We created a simple tool to manually evaluate the hypothesis that a sky can be separated from a photo with one threshold. In this prototype, we compute the similarity between superpixels as an Euclidean distance between their mean colors in the RGB color space. For the most of images from our dataset we found a threshold which can be used for sky segmentation process.
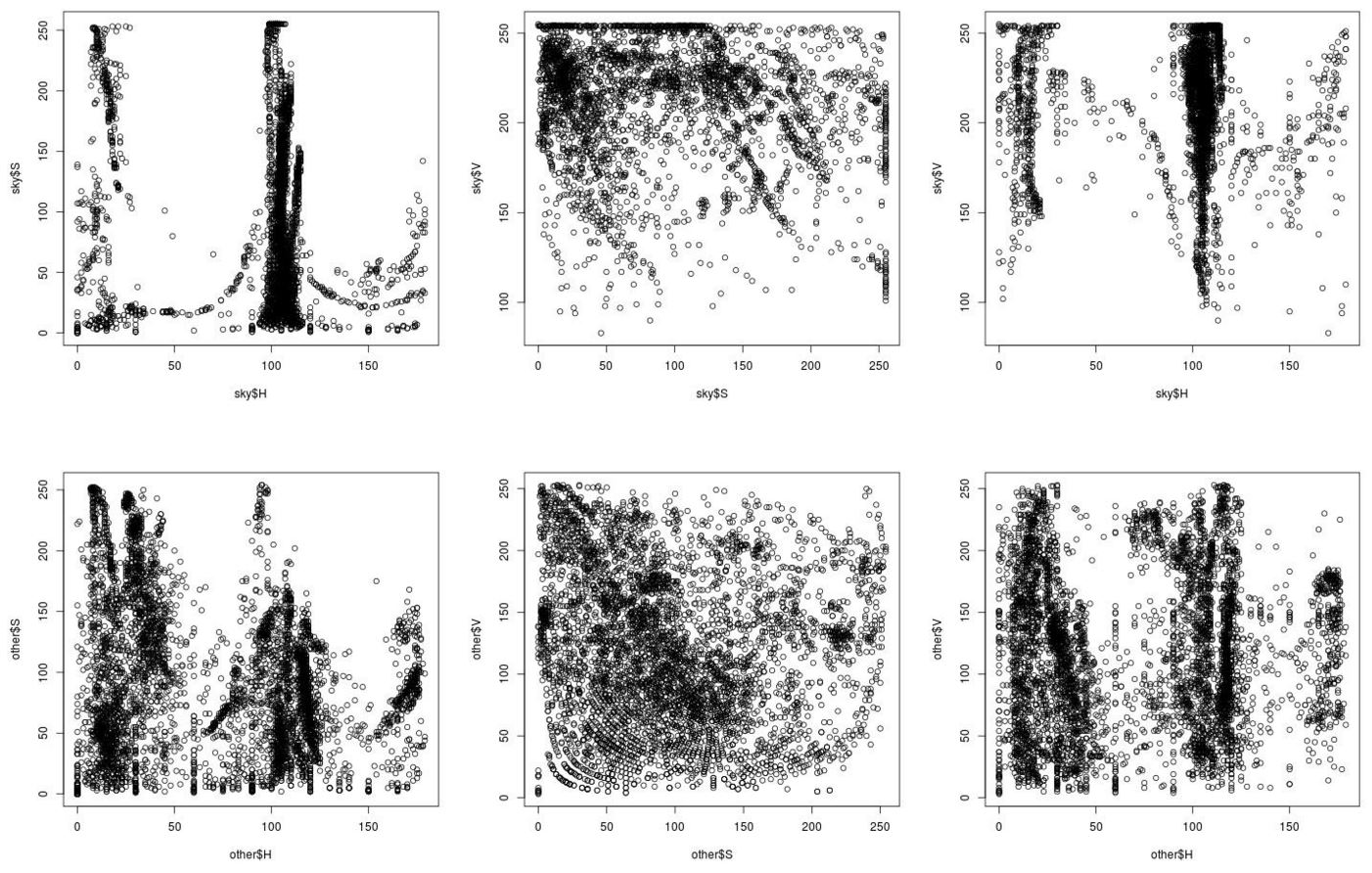
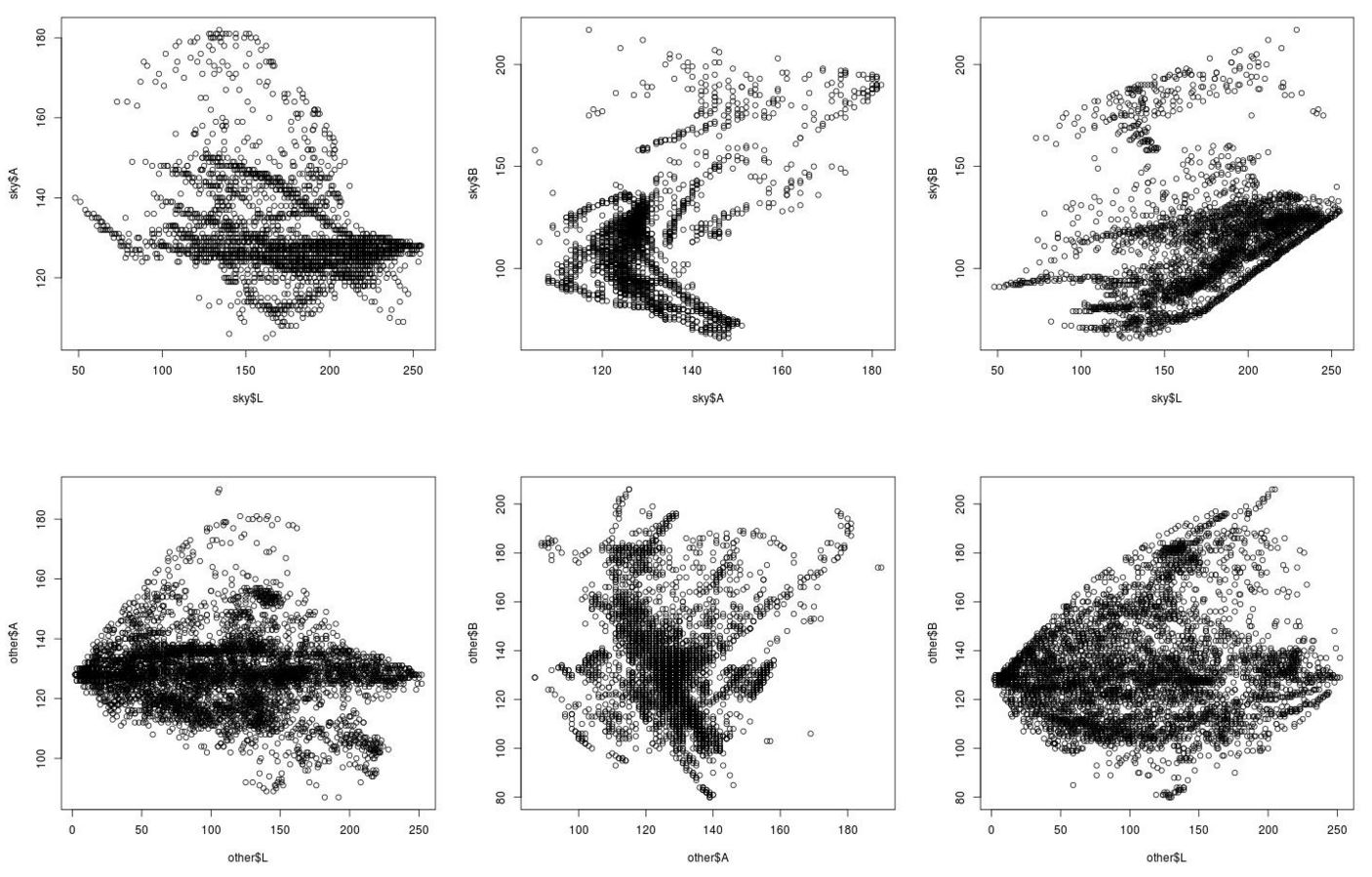
Next, we analyzed colors of images from our dataset. For each image we saved superpixel colors for sky and the rest of the image in three color spaces (RGB, HSV and Lab) and we plotted them. The resulting graphs are shown below (the first row of graphs represents sky colors, the second row represents colors of the rest of an image). As we can see, the biggest difference is in HSV an Lab color spaces. Based on this evaluation, we choosed Lab as a base working color space to compare superpixels.
RGB
HSV
Lab
Final algorithm
Generating superpixels using Slic algorithm
Replacing superpixels with their mean color values
Setting threshold:
T = [ d1 + (d2 - d1) * 0.3 ] * 1.15
where:
d1 – average distance between superpixels in the top 10% of an image
d2 – average distance between superpixels in an image without â…“ smallest distances
The values 0,3 and 1,15 was choosed for best (universal) results for our dataset.
Merging adjecent superpixels
Choosing sky – superpixel with the largest number of pixels in the first row
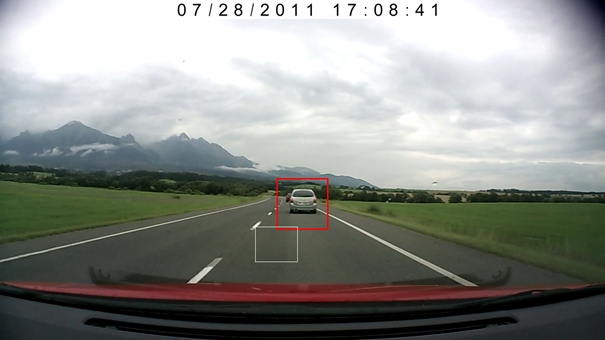
This project started with car detection using Haar Cascade Classifier. Then we focused on eliminating false positive results by using road detection. We tested the solution on a recorded video, which was obtained with a car camera recorder.
Capture road sample every n-th frame, by capturing rectangle positioned statically in the frame (white rectangle in the examples). Road sample shouldn’t contain line markings. We used canny and countNonZero to avoid line marking.
Road samples
Calculate average road color from captured road samples
Average road color
Convert image and average road sample to LAB color space.
For each pixel from the input image, calculate:
where L, A, B are values from the input image and l, a, b are values from average road sample.
Binarize the result by using threshold function.
Example
Input image, car detected is in red rectangleRoad detection
Bag of visual words (BOW) representation was based on Bag of words in text processing. This method requires following for basic user:
Image dataset splitted into image groups, or
precomputed image dataset and group histogram representation stored in .xml or .yml file (see XML/YAML Persistence chapter in OpenCV documentation)
at least one image to compare via BOW
Image dataset is stored in folder (of any name) with subfolders named by group names. In the subfolders there are images for current group stored. BOW should generate and store descriptors and histograms into specified output .xml or .yml file.
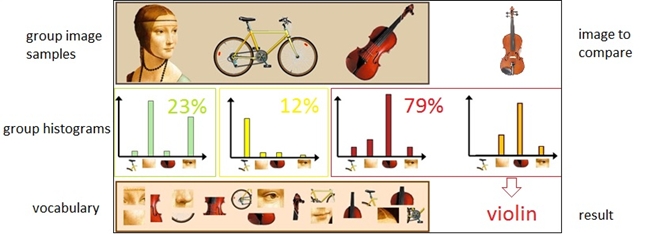
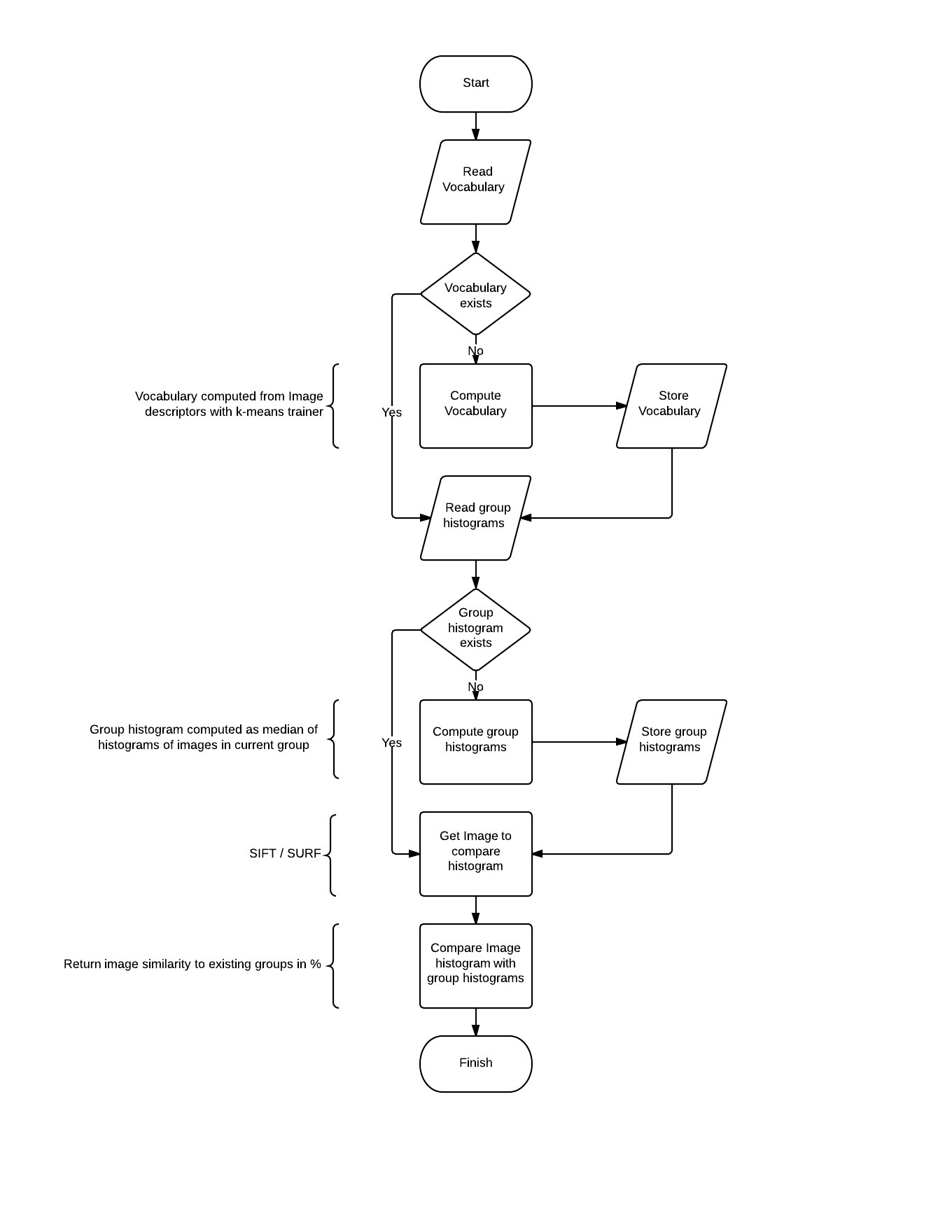
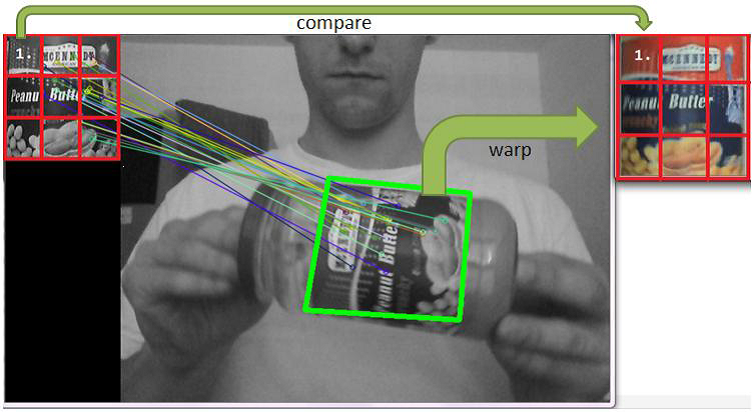
BOW works as follows (compare with Figure 1 and 2):
compute visual word vocabulary with k-means algorithm (where k is equivalent with count of visual words in vocabulary). Vocabulary is stored into output file. This should take about 30 minutes on 8 CPU cores when k=500 and image count = 150. OpenMP is used to improve performance.
compute group histograms (there are 2 methods implemented for this purpose – median and average histogram, only median is used because of better results). This part requires vocabulary computed. Group histogram is normalized histogram, this means sum of all columns within the histogram equals 1.
compute histogram for picture on input and compare it with all group histograms to realize which group image belongs to. This was implemented as histogram intersection.
As seen in Figure 2, whole vocabulary and group histogram computation may be skipped if they were already computed.
Figure 1: BOW tacticFigure 2: Flowchart for whole BOW implementation
For usage simplification I have implemented BOWProperties class as singleton, which holds basic information and settings like BOWDescriptorExtractor, BOWTrainer, reading images as grayscaled images or method for obtaining descriptors (SIFT and SURF are currently implemented and ready to use). Example of implementation is here:
BOWProperties* BOWProperties::setFeatureDetector(const string type, int featuresCount)
{
Ptr<FeatureDetector> featureDetector;
if (type.compare(SURF_TYPE) == 0)
{
if (featuresCount == UNDEFINED) featureDetector = new SurfFeatureDetector();
else featureDetector = new SurfFeatureDetector(featuresCount);
}
...
}
This is how all other properties are set. The only thing that user have to do is simply set properties and run classification.
There is in most cases single DataSet object holding reference to groups and some Group objects that holds references to images in the group in my implementation. Training implementation:
DataSet part :
void DataSet::trainBOW()
{
BOWProperties* properties = BOWProperties::Instance();
Mat vocabulary;
// read vocabulary from file if not exists compute it
if (!Utils::readMatrix(properties->getMatrixStorage(), vocabulary, "vocabulary"))
{
for each (Group group in groups)
group.trainBOW();
vocabulary = properties->getBowTrainer()->cluster();
Utils::saveMatrix(properties->getMatrixStorage(), vocabulary, "vocabulary");
}
BOWProperties::Instance()
->getBOWImageDescriptorExtractor()
->setVocabulary(vocabulary);
}
Group part (notice OpenMP usage for parallelization):
unsigned Group::trainBOW()
{
unsigned descriptor_count = 0;
Ptr<BOWKMeansTrainer> trainer = BOWProperties::Instance()->getBowTrainer();
#pragma omp parallel for shared(trainer, descriptor_count)
for (int i = 0; i < (int)images.size(); i++){
Mat descriptors = images[i].getDescriptors();
#pragma omp critical
{
trainer->add(descriptors);
descriptor_count += descriptors.rows;
}
}
return descriptor_count;
}
This part of code generates and stores vocabulary. The getDescriptors() method returns descriptors for current image via DescriptorExtractor class. Next part shows how the group histograms are computed:
Where getMedianHistogram() method generates median histogram from histograms that are representing each image in current group.
Now the vocabulary and histogram classifiers are computed and stored. Last part is comparing new image with the classifiers.
Group DataSet::getImageClass(Image image)
{
for (int i = 0; i < groups.size(); i++)
{
currentFit = Utils::getHistogramIntersection(groups[i].getGroupClasifier(), image.getHistogram());
if (currentFit > bestFit){
bestFit = currentFit;
bestFitPos = i;
}
}
return groups[bestFitPos];
}
The returned group is group where image most possibly belongs. Nearly every piece of code is little bit simplified but shows basic thoughts. For more detailed code, see sources.
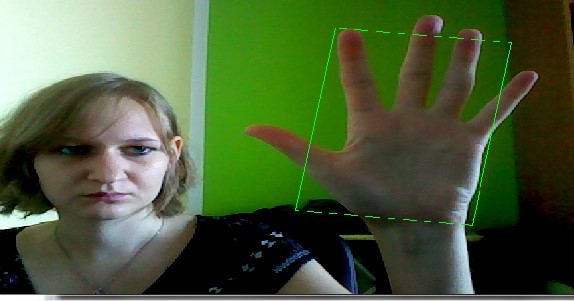
Aim of this project was implementing of finger counter with OpenCV. Input from ordinary webcam was used and it is possible to get realtime results, now. At first, we segmented hand using camshift algorithm. After that, we got hand contours and convexity defect. There was used very simple algorithm to count fingers when the convexity defects were known.
Function used: calcHist, calcBackProject, CamShift, threshold, morphologyEx, findContours, convexHull, convexityDefects
Input
The process
Selecting a litle square on the hand with the mouse.
Manual making the selection bigger (it is important to have whole fingers in the selection), but not too big because of face. If face is in the selection, hand segmentation is no longer possible.
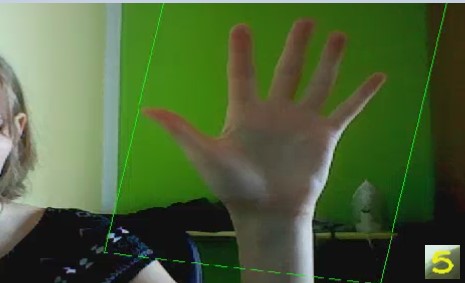
The selection of hand is cut off and rotate to natural position for human (fingers point to the top).
int angle = trackBox.angle;
Size rect_size = trackBox.size;
if (angle >90){
angle -= 180;
angle *= -1;
}
M = getRotationMatrix2D(trackBox.center, angle, 1.0);
warpAffine(backprojMask, rotatedMask, M, backprojMask.size(), INTER_CUBIC);
getRectSubPix(rotatedMask, rect_size, trackBox.center, croppedMask);
Counting fingers using convexity defects. We do not count too small convexity defects, defects with too long distance between start and end point and too small distance, too. This is the way how to filter defects between fingers. Number of finger is always number of defects plus 1. It is not the best way but for purposes of this project it is good.
int fingerCount = 1;
for (int i = 0; i< defects.size(); i++){
int start_index = defects[i][0];
CvPoint start_point = contours[largestContourIndex][start_index];
int end_index = defects[i][1];
CvPoint end_point = contours[largestContourIndex][end_index];
double d1 = (end_point.x - start_point.x);
double d2 = (end_point.y - start_point.y);
double distance = sqrt((d1*d1)+(d2*d2));
int depth_index = defects[i][2];
int depth = defects[i][3]/1000;
if (depth > 10 && distance > 2.0 && distance < 200.0){
fingerCount ++;
}
}
Previous steps are running really fast so it is not possible to show new result after every single iteration. The result can be change because of small mistake or noise. This is reason why we decided to show average value of last 15 cycles as result.
countValue[iCV%15] = itCount;
iCV++;
int count = 0;
for (int i=0; i<15; i++){
count += countValue[i];
}
count = count/15;
stringstream ss;
ss << count;
string str = ss.str();
Point textOrg(10, 130);
putText(input, str, textOrg, 1, 3, Scalar(0,255,255), 3);
Sample
Back projectionCamShiftTreshold and morfology closingConvexity defects
This project shows text extraction from the input image. It is used for road sign texts translations. First, the image is preprocessed using OpenCv functions and than the text from road sign is detected and extracted.
This project focuses on the usage of computer vision within the field of board games. We propose a new approach for extracting the position of game board, which consists of the detection of empty fields based on the contour analysis and elipse fitting, locating the key points by using probabilistic Hough lines and of finding the homography by using these key points.
Detecting lines and their directions – using Sobel filter (magnitudes are obtained using the magnitude function and directions are computed using atan2 from horizontal and vertical gradients)
Tracing lines beginning at the seeds – we are going from each seed to both directions to find the line while checking if the curves do not exceed a threshold (the more curved lines are probably not the contour lines).
Filtering of the traced lines – only the lines having both ends at the image boundaries or the closed lines are considered as the map contour lines.
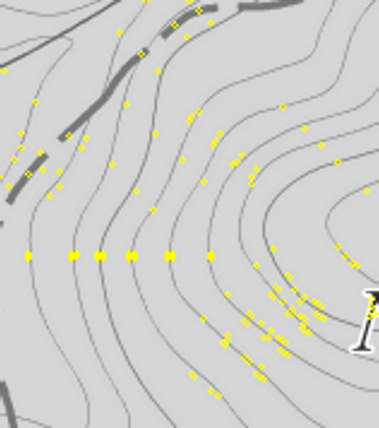
Input image.Finding some contour line seeds.Result – contour lines detected.
The result image shows a map with some contour lines detected. The seeds and line points are marked as follows:
yellow – seed points
red – closed line points
green – points of the first part of a line ending at the image edge
blue – points of the second part of a line ending at the image edge
Problems and possible improvements
These algorithm properties cause problems and need to be considered in the algorithm improvements:
line intersections are not being detected – one line from each pair of the intersecting lines should always be removed,
the algorithm uses a global magnitude threshold (the threshold determines if a point belongs to a line), but the line intensities change in most images,
the algorithm has too many parameters which were not generalized to match more possible images,
some contour lines are not continuous (they are splitted by labels) and thus not being detected by the algorithm.
This project shows object recognition using local features-based methods. We use four methods for keypoints detection and description: SIFT/SIFT, SURF/SURF, FAST/FREAK and ORB/ORB. Keypoints are used to compute homography. Object is located in scene with RANSAC algorithm. RGB and hue-saturation histograms are used for RANSAC verification.
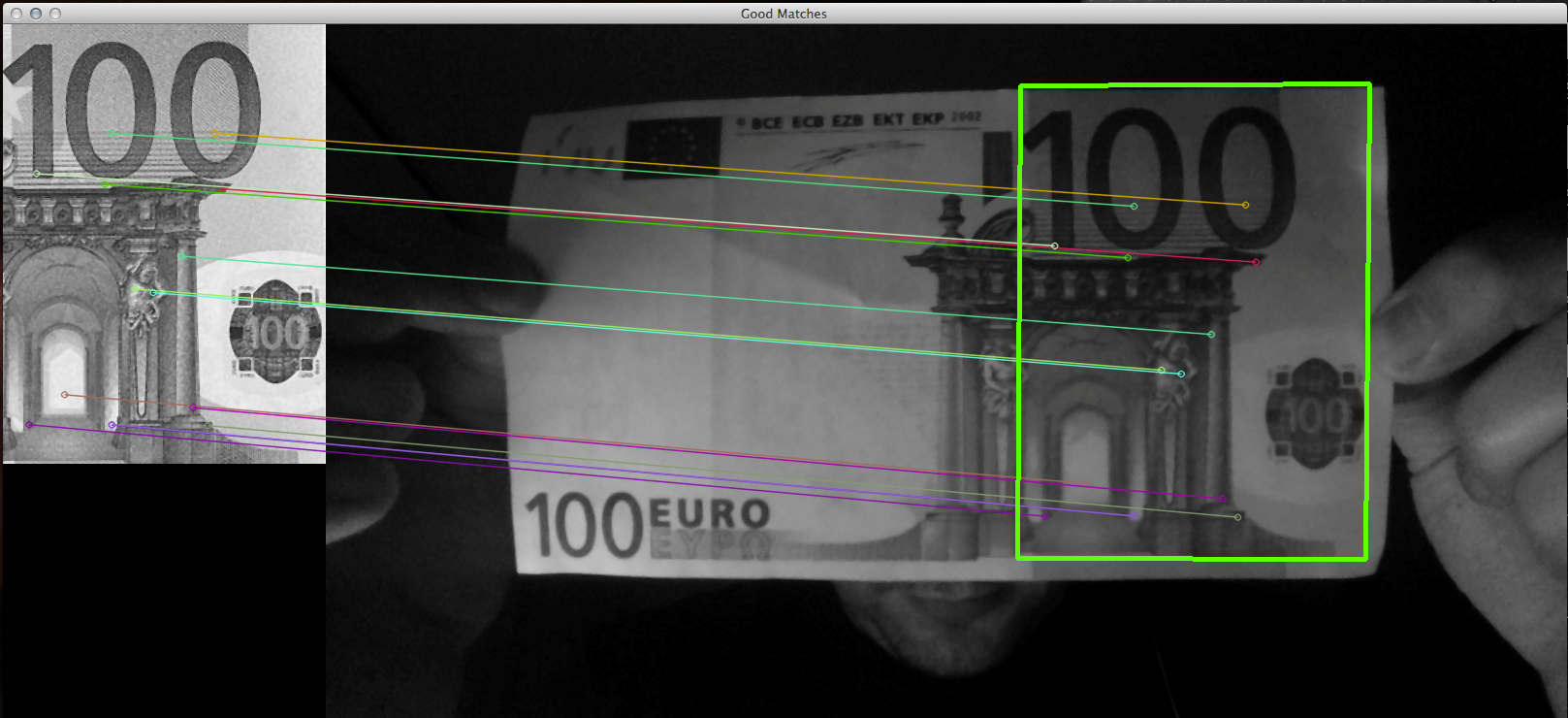
The project shows detection and recognition of euro money bill from input image (webcam). For each existing euro money bill is chosen template that contains number value of bill and also its structure. For matching templates with input images is used Flann Based matcher of local descriptors extracted by SURF algorithm.
Project is focused on the image detection which major components are cities and buildings. Buildings and cities detection assumes occurence of the edges as implication of the Windows and walls, as well as presence of the sky. Algorithm creates the feature vector with SVM classification algorithm.








































")
")