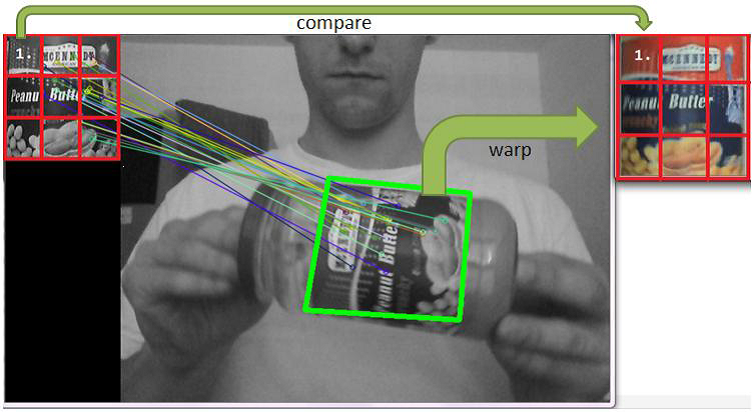
This project shows object recognition using local features-based methods. We use four methods for keypoints detection and description: SIFT/SIFT, SURF/SURF, FAST/FREAK and ORB/ORB. Keypoints are used to compute homography. Object is located in scene with RANSAC algorithm. RGB and hue-saturation histograms are used for RANSAC verification.
Functions used: FeatureDetector::detect, DescriptorExtractor::compute, knnMatch, findHomography, warp, calcHist, compareHist
Input

The process
- Keypoints detection
FeatureDetector * detector; detector = new SiftFeatureDetector(); detector->detect( image, key_points_image ); DescriptorExtractor * extractor; extractor = new SiftDescriptorExtractor(); extractor->compute( image, key_points_image, des_image );
- Keypoints description
- Keypoints matching
DescriptorMatcher * matcher; matcher = new BruteForceMatcher<L2<float>>(); matcher->knnMatch(des_object, des_image, matches, 2);
- Calculating homography
findHomography( obj, scene, CV_RANSAC );
- Histograms matching
calcHist( &hsv_img_object, 1, channels, Mat(), hist_img_object, 2, histSize, ranges, true, false ); compareHist( b_hist_object, b_hist_quad, CV_COMP_BHATTACHARYYA );
- Outline recognized object
Sample


")
")
drawMatches( gray_object, key_points_object, image,
key_points_image, good_matches, img_matches,
Scalar::all(-1), Scalar::all(-1), vector<char>(),
DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS );
if (good_matches.size() >= 4)
{
for( int i = 0; i < good_matches.size(); i++ )
{
//
obj.push_back( key_points_object[ good_matches[i].queryIdx ].pt );
scene.push_back( key_points_image[ good_matches[i].trainIdx ].pt );
}
H = findHomography( obj, scene, CV_RANSAC );
perspectiveTransform( obj_corners, scene_corners, H);
//*******************************************************
Mat quad = Mat::zeros(rgb_object.rows, rgb_object.cols,
CV_8UC3);
//warping object back to tamplate rotation
warpPerspective(frame, quad, H.inv(), quad.size());
...