Jan Handzus
Main objective of this project was to reconstruct the 3D scene from set of images or recorded video. First step is to find relevant matches between two related images and use this matches to calculate rotation and translation of camera for each input image or frame. In final stage the depth value is extracted with triangulation algorithm.
INPUT

THE PROCESS
- Find features in two related images:
SurfFeatureDetector detector(400); detector.detect(actImg, keypoints1); detector.detect(prevImg, keypoints2);
- Create descriptors for features:
SurfDescriptorExtractor extractor(48, 18, true); extractor.compute(actImg, keypoints1, descriptors1); extractor.compute(prevImg, keypoints2, descriptors2);
- Pair descriptors between two images and find relevant matches:
BFMatcher matcher(NORM_L2); matcher.match(descriptors1, descriptors2, featMatches);
- After we have removed the irrelevant key-points we need to extract the fundamental matrix:
vector<Point2f> pts1,pts2; keyPointsToPoints(keypoints1, pts1); keyPointsToPoints(keypoints2, pts2); Fundamental = findFundamentalMat(pts1, pts2, FM_RANSAC, 0.5, 0.99, status);
- Calculate the essential matrix:
Essential = (K.t() * Fundamental * K);
K…. the camera calibration matrix.
- First camera matrix is on starting position therefore we must calculate second camera matrix P1:
SVD svd(Essential, SVD::MODIFY_A); Mat svd_u = svd.u; Mat svd_vt = svd.vt; Mat svd_w = svd.w; Matx33d W(0, -1, 0, 1, 0, 0, 0, 0, 1); //Rotation Mat_<double> R = svd_u * Mat(W) * svd_vt; //Translation Mat_<double> t = svd_u.col(2);
- Find depth value for each matching point:
//Make A matrix. Matx43d A(u.x*P(2, 0) - P(0, 0), u.x*P(2, 1) - P(0, 1), u.x*P(2, 2) - P(0, 2), u.y*P(2, 0) - P(1, 0), u.y*P(2, 1) - P(1, 1), u.y*P(2, 2) - P(1, 2), u1.x*P1(2, 0) - P1(0, 0), u1.x*P1(2, 1) - P1(0, 1), u1.x*P1(2, 2) - P1(0, 2), u1.y*P1(2, 0) - P1(1, 0), u1.y*P1(2, 1) - P1(1, 1), u1.y*P1(2, 2) - P1(1, 2) ); //Make B vector. Matx41d B(-(u.x*P(2, 3) - P(0, 3)), -(u.y*P(2, 3) - P(1, 3)), -(u1.x*P1(2, 3) - P1(0, 3)), -(u1.y*P1(2, 3) - P1(1, 3))); //Solve X. Mat_<double> X; solve(A, B, X, DECOMP_SVD); return X; SVD svd(Essential, SVD::MODIFY_A); Mat svd_u = svd.u; Mat svd_vt = svd.vt; Mat svd_w = svd.w; Matx33d W(0, -1, 0, 1, 0, 0, 0, 0, 1); //Rotation Mat_<double> R = svd_u * Mat(W) * svd_vt; //Translation Mat_<double> t = svd_u.col(2
SAMPLE
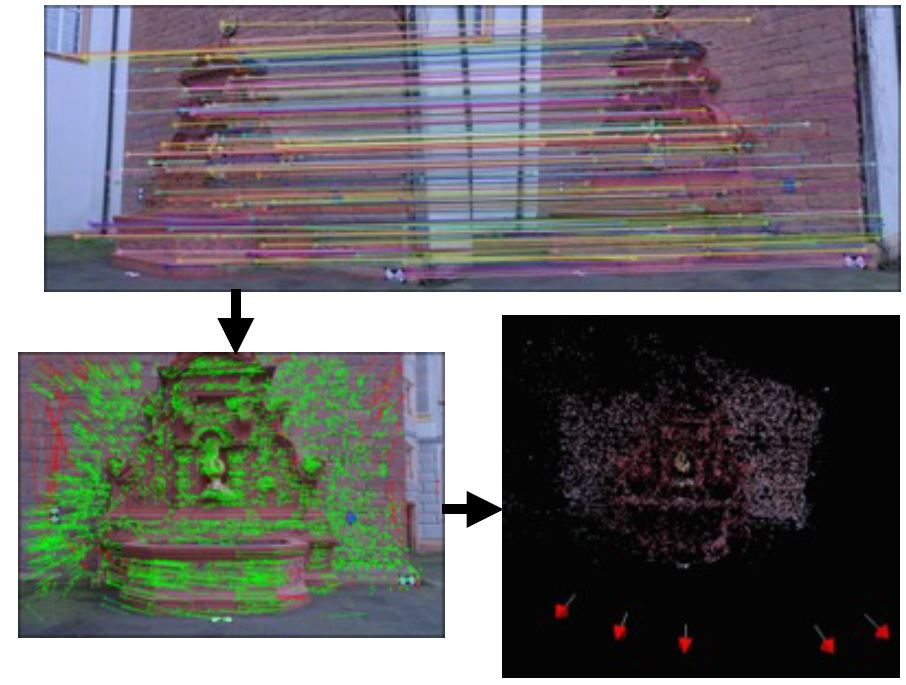
CONCLUSION
We have successfully extracted the depth value for each relevant matching point. But we were not able to visualise the result because of the PCL and other external libraries. In future we try to use Matlab to validate our result.
SOURCES
http://packtlib.packtpub.com/library/9781849517829/ch04
http://www.morethantechnical.com/2012/02/07/structure-from-motion-and-3d-reconstruction-on-the-easy-in-opencv-2-3-w-code/