
Jan Onder
The goal of this project is to determine the state of a parking lot, more precisely the number of parking spaces. Basically this project is divided to two interconnected parts. One to determine number of parking spots from image, for example from first frame of video from camera, monitoring the parking lot, and second to determine wheter, or not is there a movement on the parking lot.
The process:
- We get parking lines from image of parking lot and get rid of noise:
Canny(inputImage, helpMatrix, 450, 400, 3); cvtColor(helpMatrix, helpMatrix2, CV_GRAY2BGR); vector<Vec4i> lines; HoughLinesP(helpMatrix, lines, 1, CV_PI / 180, 7, 10, 10); for (size_t i = 0; i < lines.size(); i++) { Vec4i l = lines[i]; line(helpMatrix2, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(0, 0, 255), 5, CV_AA) } Mat element2 = getStructuringElement(CV_SHAPE_RECT, Size(3, 3)); cv::erode(helpMatrix2, helpMatrix2, element); cv::dilate(helpMatrix2, helpMatrix2, element2);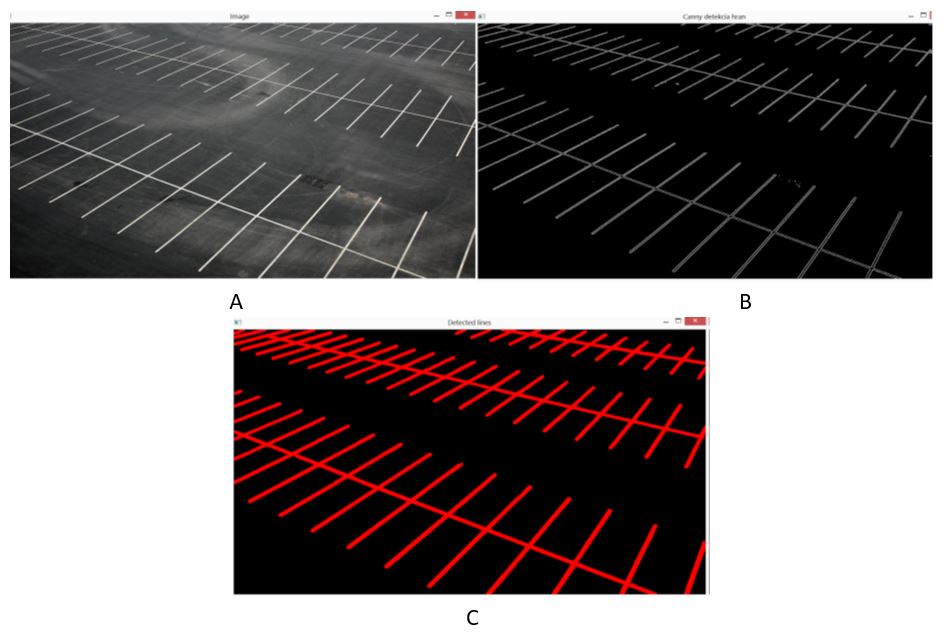
Original Image (A), Canny edges with noise (B), HoughLines without noise (C) - We use double dilate and substract their results to get mask of lines:
morphologyEx(helpMatrix2, mark, CV_MOP_DILATE, element,Point(-1,-1), 3); morphologyEx(helpMatrix2, mark2, CV_MOP_DILATE, element, Point(-1, -1), 2); result = mark - mark2;
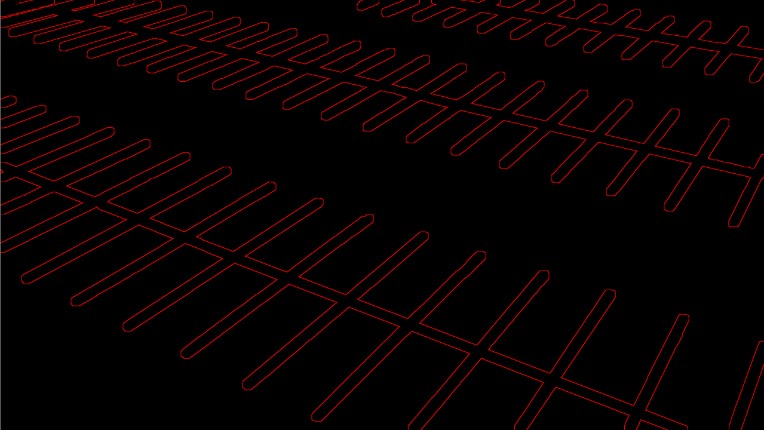
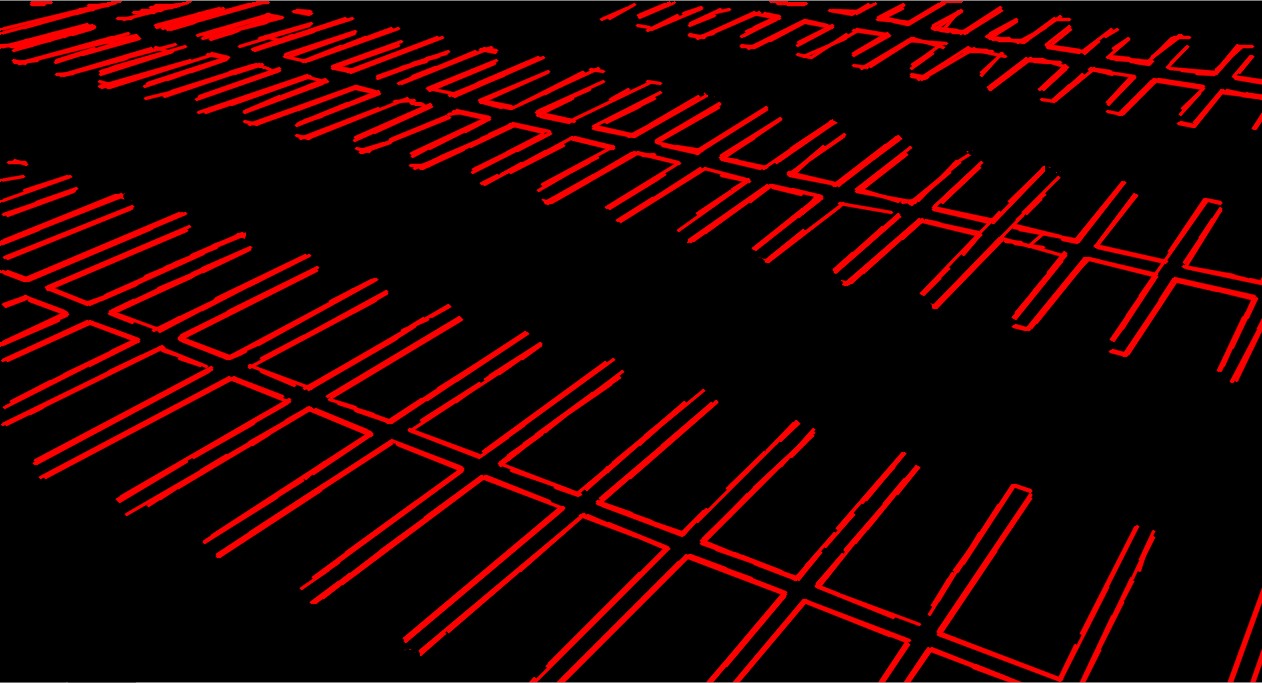
Result of dilating and substracting - We use Canny and Hough lines, this time for removing the connecting line between each parking spot:
Canny(resu, mark, 750, 800, 3); cvtColor(mark, mark2, CV_GRAY2BGR); mark2 = Scalar::all(0); vector<Vec4i> lines3; HoughLinesP(mark, lines3, 1, CV_PI / 180, 20, 15, 10); for (size_t i = 0; i < lines3.size(); i++) { Vec4i l = lines3[i]; line(mark2, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(0, 0, 255), 2, CV_AA); }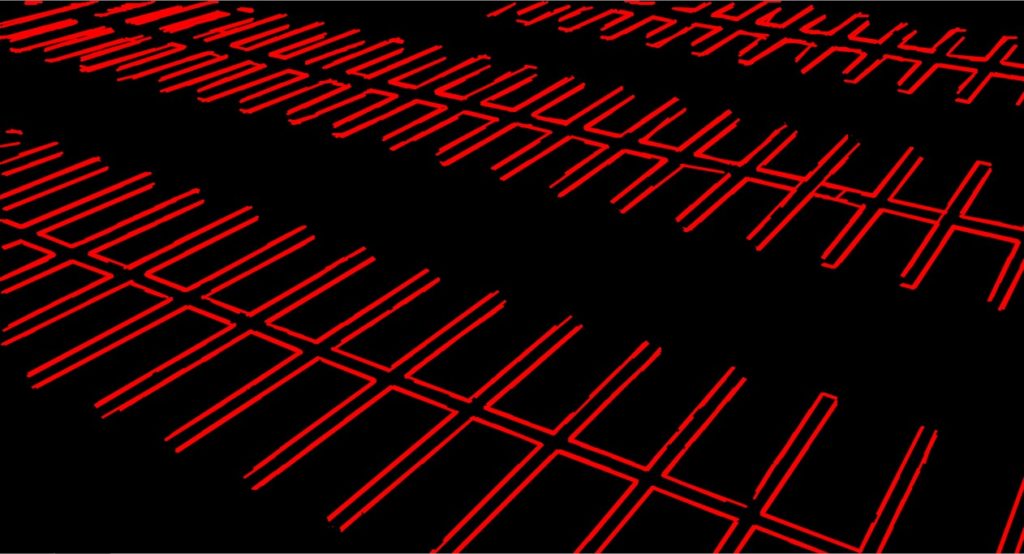
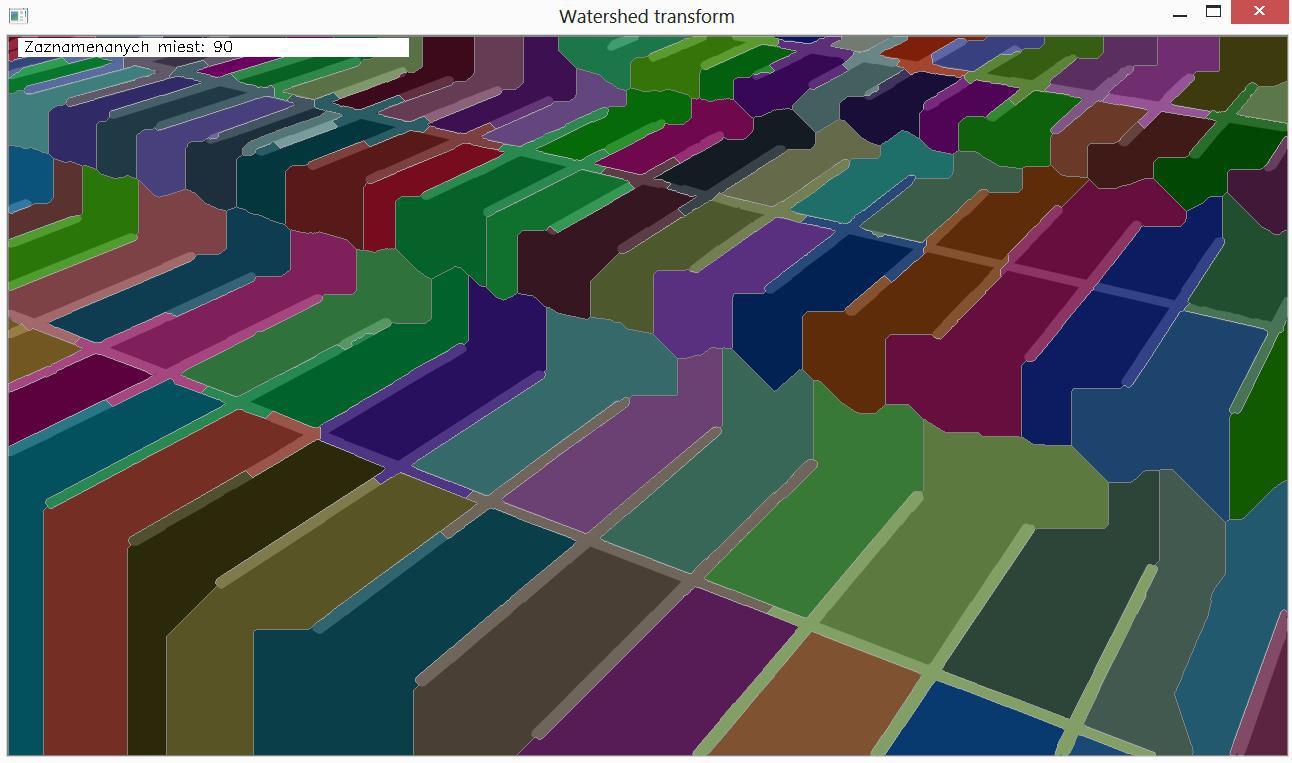
Result of Hough lines to remove connection between lines in mask - We use this as a mask for finding contours for the Watershed algorithm and get result with detected parking spots, each colored with different color:
vector<vector<Point> > contours; vector<Vec4i> hierarchy; findContours(markerMask, contours, hierarchy, RETR_CCOMP, CHAIN_APPROX_SIMPLE); int contourID = 0; for (; contourID >= 0; contourID = hierarchy[contourID][0], parkingSpaceCount++) { drawContours(markers, contours, contourID, Scalar::all(parkingSpaceCount + 1), -1, 8, hierarchy, INT_MAX); } watershed(helpMatrix2, markers); Mat wshed(markers.size(), CV_8UC3); for (i = 0; i < markers.rows; i++) for (j = 0; j < markers.cols; j++) { int index = markers.at<int>(i, j); if (index == -1) wshed.at<Vec3b>(i, j) = Vec3b(255, 255, 255); else if (index <= 0 || index > parkingSpaceCount) wshed.at<Vec3b>(i, j) = Vec3b(0, 0, 0); else wshed.at<Vec3b>(i, j) = colorTab[index - 1]; }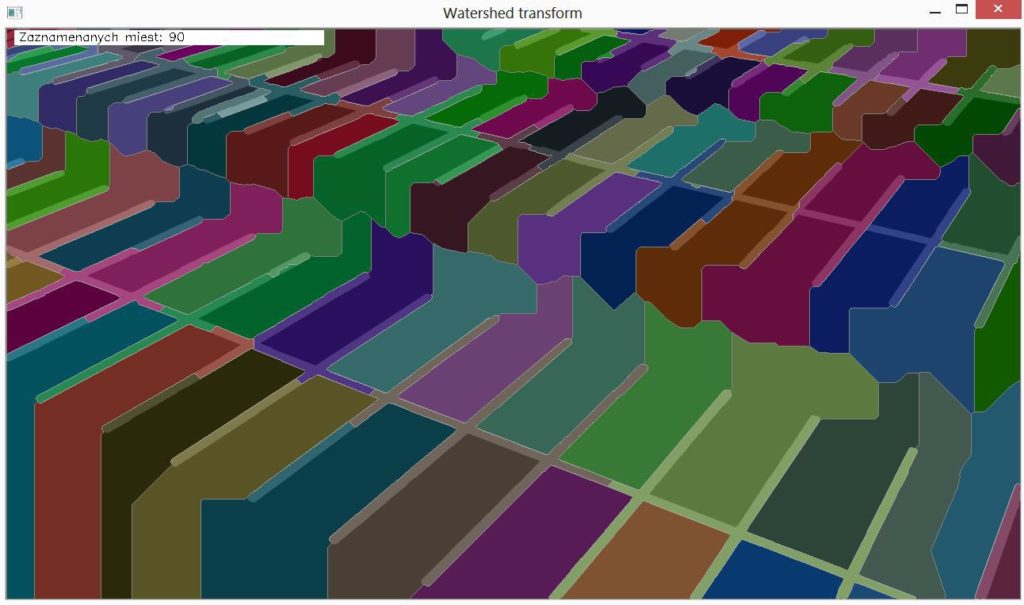
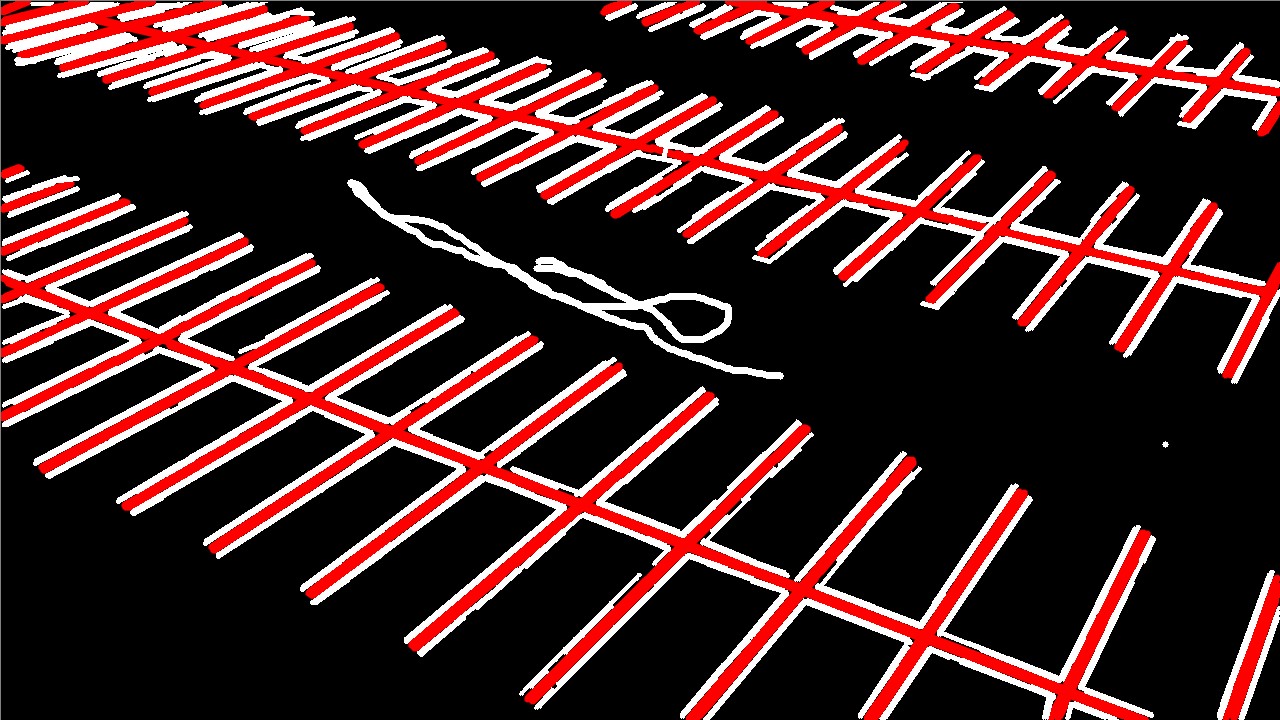
Result of watershed algorithm with detected parking spots - If our user is not satisfied with this result, he can always draw the seeds for watershed himself, or just adjust these seeds (img is the name of matrix, where user can see markers and markerMask matrix, where seeds are stored):
Point prevPt(-1, -1); static void onMouse(int event, int x, int y, int flags, void*) { if (event == EVENT_LBUTTONDOWN) prevPt = Point(x, y); else if (event == EVENT_MOUSEMOVE && (flags & EVENT_FLAG_LBUTTON)) { Point pt(x, y); if (prevPt.x < 0) prevPt = pt; line(markerMask, prevPt, pt, Scalar::all(255), 5, 8, 0); line(img, prevPt, pt, Scalar::all(255), 5, 8, 0); prevPt = pt; imshow("image", img); } }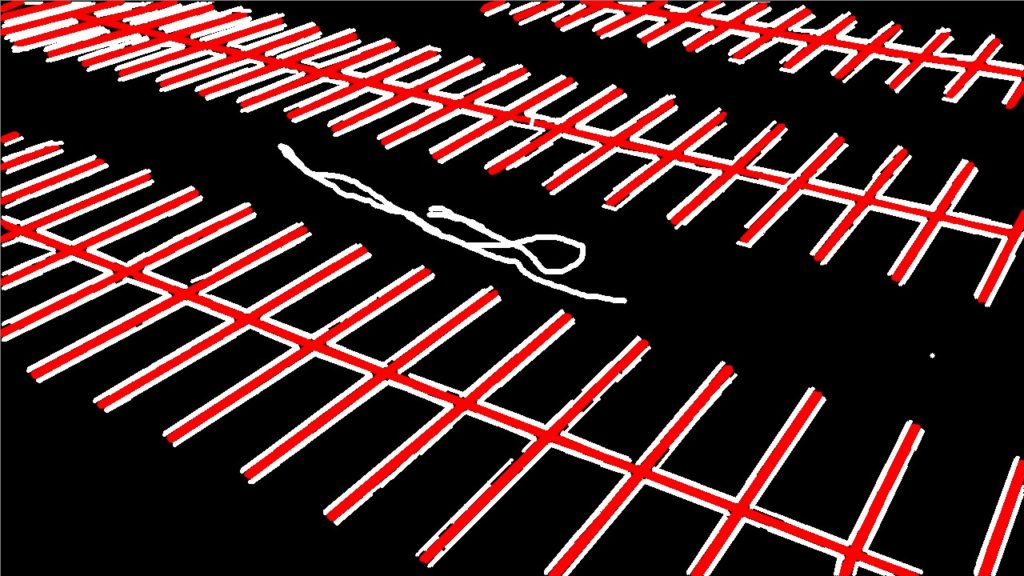
User inputing seeds for watershed algorithm - We have our spots stored, so we know their exact location, now its time to determine, wheter, or not check the lot again, if some vehicles are moving. For this purpose we need to detect movement on the lot with backgroundSubstraction, which can constantly learn what is static in image:
Ptr<BackgroundSubtractor> pMOG2; pMOG2 = new BackgroundSubtractorMOG2(3000, 20.7,true);
- We will give the MOG every frame captured from video feed and see what it results:
pMOG2->operator()(frame, matMaskMog2,0.0035); imshow("MOG2", matMaskMog2);
Result of MOG substraction - As we can see, there is some noise detected – this noise represents for example moving leaves on trees, so it is necessary to remove it:
cv::morphologyEx(matMaskMog2, matMaskMog2, CV_MOP_ERODE, element); cv::medianBlur(matMaskMog2, matMaskMog2, 3); cv::morphologyEx(matMaskMog2, matMaskMog2, CV_MOP_DILATE, element2);
- Finally we find coordinates of moving object from MOG and draw a rectangle with random color around it (result can be seen at the top):
scv::findContours(matMaskMog2, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE); vector<vector<Point> > contours_poly(contours.size()); vector<Rect> boundRect(contours.size()); for (int i = 0; i < contours.size(); i++) { approxPolyDP(Mat(contours[i]), contours_poly[i], 3, true); boundRect[i] = boundingRect(Mat(contours_poly[i])); } RNG rng(01); for (int i = 0; i< contours.size(); i++) { Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)); rectangle(frame, boundRect[i].tl(), boundRect[i].br(), color, 2, 8, 0); }
Result:
We have a functional parking spot detection, which means we can easily determine how much parking spots our parking lot have. We also have stored where are these parking spots exactly located. From the camera feed, we can detect car movement and also determine, on which coordinates the movement stopped. We did not implemented the function to connect these infomormation sources, but it can be easily added.
Limitations:
- For parking spots detection we need an empty lot. Otherwise it will be nearly impossible to determine where are these spots exactly located, mainly if vehicles are not parking at their exact center.
- For movement detection, we need static camera feed, becouse of used MOG method, which constantly learns what is background and which object are moving.
- Parking spots detection is not perfect, it still needs some user correction to determine exact number of parking spots.