This example shows how to separate and track moving object using OpenCV. First, the background of the video is being calculated and moving objects detected, then it is filtered and tracked.
Used: cv::BackgroundSubtractorMOG2; cv::getStructuringElement; cv::morphologyEx; cv::BackgroundSubtractorMOG2.operator();
The process
- Initialize the background extraction object
BackgroundSubtractorMOG2 bg( 500, 64, false);
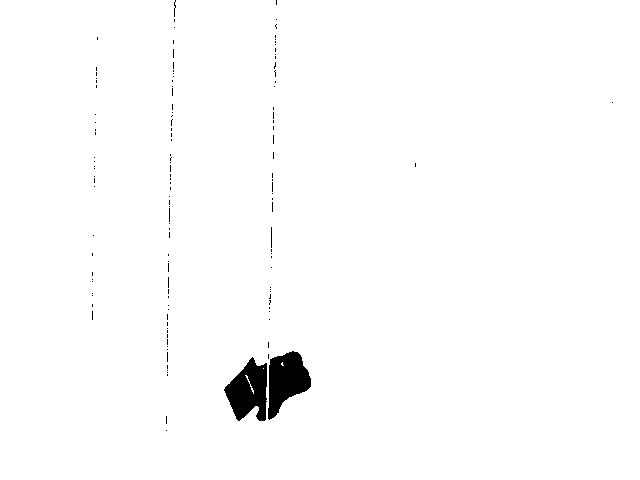
- Process video frame by background extraction object by it’s method operator and receive mask of moving object
bg.operator()( origi, mask);
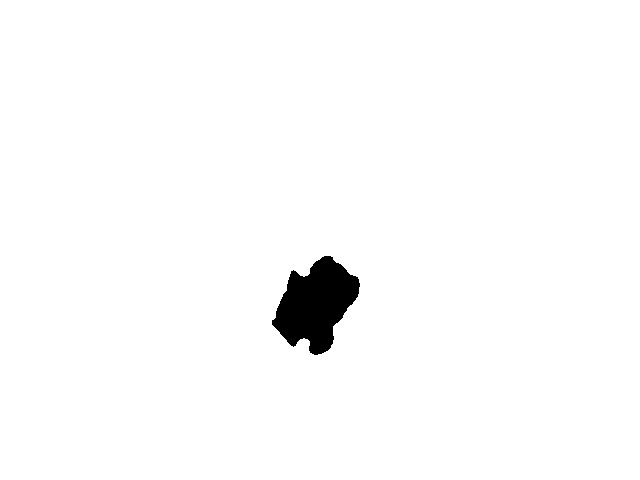
- Process mask by morphologyEx’s open to remove noise in mask
morphologyEx( mask, mask, MORPH_OPEN, element1 );
- Process mask by morphologyEx’s close to close gaps in mask
morphologyEx( mask, mask, MORPH_CLOSE, element2 );
- Apply mask on video frame
origi.copyTo( proci0, mask);
- Find good features to track and apply KLTracker
goodFeaturesToTrack( proci0, points[0], MAX_COUNT, 0.1, 10, Mat(), 3, 0, 0.04); calcOpticalFlowPyrLK( proci1, proci0, points[0], points[1], status, err, winSize, 3, termcrit, 0, 0.00001);
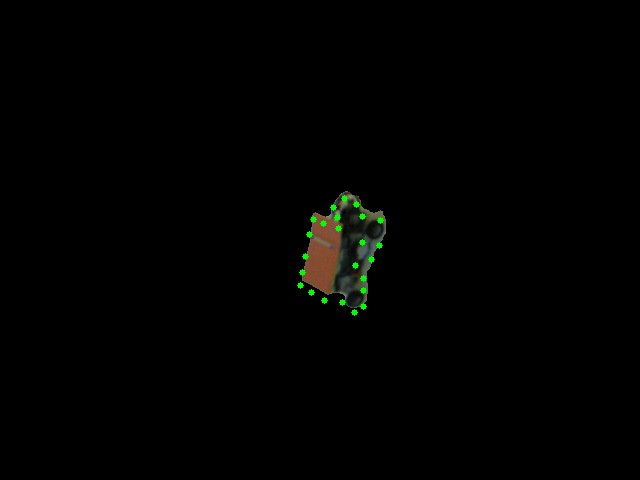
- Combine with initial frame
size_t i, k; for (i = k = 0; i < points[1].size(); i++) { if (!status[i]) continue; points[1][k++] = points[1][i]; circle(finI, points[1][i], 3, Scalar(0, 255, 0), -1, 8); circle(procI2, points[1][i], 3, Scalar(0, 255, 0), -1, 8); } points[1].resize(k);
- Find contours of the mask, find it’s bounding rectangle and draw it onto output frame
findContours(procI3, contours, CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE); if (contours.size() > 0) for (int i = 0; i < (int)contours.size(); i++) rectangle(finI, boundingRect(contours[i]), Scalar(0, 255, 0));

Bounding rectangle hints position of moving object on the scene and could be used to approximate it’s coordinates